物聯網虛擬化快速實現協作機器人
製造自動化的下一次變革,正在圍繞協作機器人慢慢成形。協作機器人(一種自主機器人)能夠與人類工人一起安全工作。雖然機器人似乎有明顯的優勢,但這些複雜系統的設計卻並非如此。
沒錯,打造協作機器人所需的大多數促使科技現在都已經問世。許多甚至已廣泛通用,從利用機器人看世界的高解析度攝影機,到具有本地管理物聯網連接功能、邊緣機器學習和控制任務功能的多核處理器。
其中的挑戰並不在於是否有技術,而在於將所有技術整合在一起的過程:並在單一平台上以降低耗電、成本和設計複雜性的方式進行。實現這一目標的合理起點,可以從使用一個高階模組替代多個單一功能機器人控制器開始。但即使是這步驟也相當不容易。
「協作機器人必須同時執行多項任務,」嵌入式系統工程服務和產品的領先供應商 Real-Time Systems GmbH 的銷售和行銷主管 Michael Reichlin 表示。「從即時運動控制開始,到高效能運算。」
「隨著協作機器人的感應器、互動能力和通訊功能的數量不斷增加,會需要能夠執行具有不同要求的各種工作負載的多功能控制器,」Reichlin 接著表示。「我們需要讓這些工作負載同時執行,並且不能相互干擾。」
直到這一步,才是最麻煩的部分。
製造業中的物聯網虛擬化和協作機器人
多核心處理技術的好處之一,就是軟體和應用程式可以將每個核心,視為具有專屬執行緒和記憶體的獨立系統。因此單個控制器可以同時管理多個應用程式。
從歷史角度來看,這種架構在機器人科技中的缺點是,將核心視為離散系統並不代表真正是離散系統。舉例來說,核心之間通常會共享記憶體資源,但資源是有限的。如果任務沒有得到適當的安排和優先排序,共享很快就會變成一種增加延遲的資源競爭,這顯然不適合像協作機器人這樣的安全關鍵型機器。
即使多核心處理器上,有足夠的記憶體和運算資源來同時支援多個應用程式,您仍然無法僅為每個核心分配一個工作負載,然後置之不理。由於複雜協作機器人設計中的許多應用程式,必須互相傳輸資料(舉例來說,一個感應器輸入會為通知控制功能的人工智慧演算法提供資訊),因此核心和軟體通常確實需要共享記憶體。
這讓我們回到了分區問題,或者正如 Reichlin 之前所稱的,一個工作負載並列運行且不會相互干擾的能力。要如何在同一個硬體上構建一個多功能系統,可以安全地分享運算資源卻不犧牲效能呢?
答案是即時 hypervisor。Hypervisor 能夠管理不同的作業系統、共享記憶體和系統事件,以確保裝置上的所有工作負載保持隔離狀態,同時仍能接收所需的資源(圖1)。
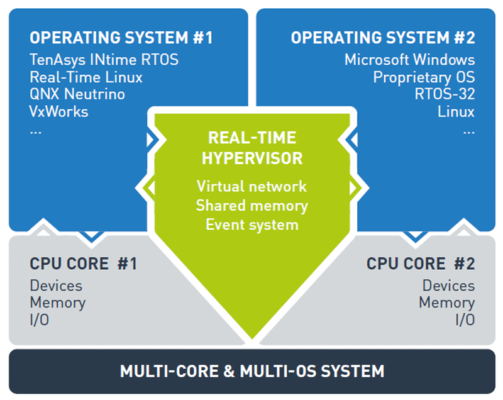
一些 hypervisor 是能夠區分不同應用程式的軟體層。但為了滿足協作機器人的確定性要求,Real-Time Hypervisor 等裸機版本,與第 6 代 Intel® Atom 和第 11 代 Intel® Core™ 處理器等物聯網導向晶片緊密整合在一起。
Atom x6000E 和第 11 代 Core 系列支援 Intel ® 虛擬化技術 (Intel® VT-x),一種運算、記憶體和其他資源的硬體輔助抽象化,可為裸機 hypervisor 提供即時性能。
「為了保持系統的確定性,我們不能在即時應用程式和硬體之間多一個軟體層。我們去掉了這個軟體層,」Reichlin 解釋道。「客戶只需設置好他們的即時應用程式即可直接存取硬體。
「我們會從啟動程式開始,分離硬體以隔離不同的工作負載,並提供您絕對的確定性。」他繼續說道。「我們不會加入任何的干擾。根據我們分離不同的核心的方法,我們也不會為即時應用程式增加任何延遲。」
在 RTS Hypervisor 分區的核心之間,資料傳輸可以根據需求以數種方式進行。舉例而言,開發人員可以透過虛擬網路或訊息中斷,在事件發生時傳送或讀取資料。
第三種選擇是透過共享記憶體,傳輸無法被其他工作負載覆寫的資料區塊。此時,RTS Hypervisor 會利用了 Intel® 處理器的原生功能,如支援 Intel® Time-Coordinated Computing (Intel® TCC) 的裝置,裡面提供的軟體 SRAM。這項新功能會將延遲敏感的資料和代碼放入高速緩衝記憶體中,以改善時間隔離。
Real-Time Hypervisor 會自動利用軟體 SRAM 等功能,且不需要開發人員對其進行配置。這要歸功於 Real-Time Systems 和 Intel® 的多年共同開發。
Hypervisor 將處理器拆分,以利協作機器人共享工作
裸機即時 hypervisor 具備的剛性,為協作機器人等系統在設計上提供了靈活性。現在,系統整合商能夠從不同來源提取具有不同時序、安全性和安全性要求的應用程式,並無縫整合至同一個機器人控制器上。
無需擔心過程之間會互相干擾或競爭有限資源,因為全部均由 hypervisor 進行管理。Real-Time Systems 也正在為其 hypervisor 開發一款安全認證版本,將能進一步簡化混合式關鍵協作機器人系統的開發和整合。
據 Reichlin 預測,從桌上型個人助理到協助人類操作重型機械的工業協作機器人,將在未來幾年成為主流。而大多數機器人都將有一個 hypervisor,允許單個處理器共享工作負載,以便協作機器人共享工作。